کنترل خودکار موقعیت کوادروتور
761 بازدید
761 بازدید
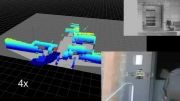
در این ویدئو بخشی از تست ها و آزمایشهای اولیه تیم ARC جهت کنترل خودکار کوادروتور نمایش داده می شود.
اندازه گیری موقعیت کاملا مستقل از GPS و یا دوربین مرجع هست و تمام محاسبات لازم برای پردازش تصویر و موقعیت یابی ربات، بر روی خود ربات انجام میشود.
البته این فیلم مربوط به نتایج اولیه بدست آمده است و در حال حاضر تیم مشغول بهبود عملکرد کنترلکننده و توسعه نرم افزار می باشد.
لازم به ذکر است تمام نرم افزار و سخت افزار مربوط به کنترل ربات توسط تیم ARC طراحی و ساخته شده است.

اولین نفری باشید که برای این ویدیو دیدگاه ارسال میکنید