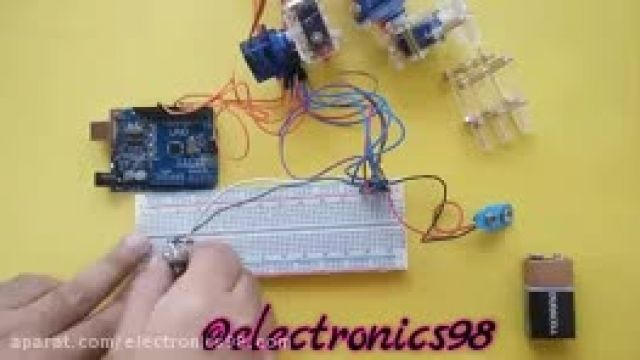
ساخت بازوی رباتیک کوچک با 4 سروو_آردوینو
6.4 هزار بازدید
6.4 هزار بازدید

این بازوی رباتیک بوسیله ی 4 سروو و یک بورد آردوینو کنترل میشود.روش کنترل بدین صورت است که فرد ابتدا بازوی سمت راست را که به نوعی فرمان محسوب میشود ،حرکت میدهد.با حرکت بازوی سمت راست،مقدار درجه ی جابجایی توسط پتانسیومتری که به مفاصل متصل شده اندازه گیری شده و این مقادیر در حافظه ی میکرو ذخیره میگردد و توسط آن به ازای هر مقدار مقاومتی که دریافت نموده ،از پایه های خود پالس برای کنترل سروو تولید میکند

اولین نفری باشید که برای این ویدیو دیدگاه ارسال میکنید